23a204d75f91c85bb542269447dbfa2164c695ce,ch13/wob_click_train.py,,,#,27
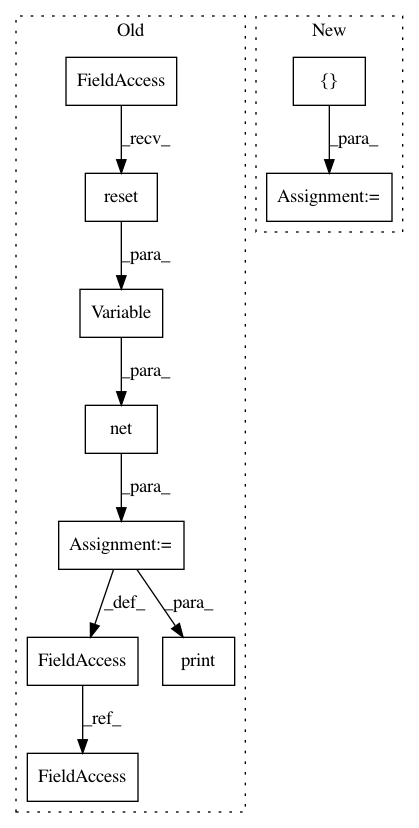
Before Change
env = wob_vnc.MiniWoBCropper(env)
env.configure(remotes=REMOTE_ADDR)
obs = env.reset()
net = model_vnc.Model(input_shape=(3, wob_vnc.HEIGHT, wob_vnc.WIDTH),
n_actions=env.action_space.n)
print(net)
obs, reward, done, info = step_env(env, env.action_space.sample())
obs_v = Variable(torch.from_numpy(np.array(obs)))
r = net(obs_v)
print(r[0].size(), r[1].size())
pass
After Change
agent = ptan.agent.PolicyAgent(lambda x: net(x)[0], cuda=args.cuda,
apply_softmax=True)
exp_source = ptan.experience.ExperienceSourceFirstLast(
[env], agent, gamma=GAMMA, steps_count=REWARD_STEPS, vectorized=True)
// obs, reward, done, info = step_env(env, env.action_space.sample())
// obs_v = Variable(torch.from_numpy(np.array(obs)))
// r = net(obs_v)
// print(r[0].size(), r[1].size())
for idx, exp in enumerate(exp_source):
print(exp)
if idx > 100:
break
time.sleep(0.5)
pass
In pattern: SUPERPATTERN
Frequency: 3
Non-data size: 10
Instances
Project Name: PacktPublishing/Deep-Reinforcement-Learning-Hands-On
Commit Name: 23a204d75f91c85bb542269447dbfa2164c695ce
Time: 2018-01-19
Author: max.lapan@gmail.com
File Name: ch13/wob_click_train.py
Class Name:
Method Name:
Project Name: PacktPublishing/Deep-Reinforcement-Learning-Hands-On
Commit Name: a0113631d7e9d6ec65531457ce03e06c902a4d0b
Time: 2017-10-17
Author: max.lapan@gmail.com
File Name: ch06/01_dqn_pong.py
Class Name:
Method Name:
Project Name: PacktPublishing/Deep-Reinforcement-Learning-Hands-On
Commit Name: 3bb0fd78af4f9dbddf7c01dde71844a283099650
Time: 2017-10-16
Author: max.lapan@gmail.com
File Name: ch06/01_dqn_pong.py
Class Name:
Method Name: