def dK_dX(self,dL_dK,X,X2,target):
derivative of the covariance matrix with respect to X.
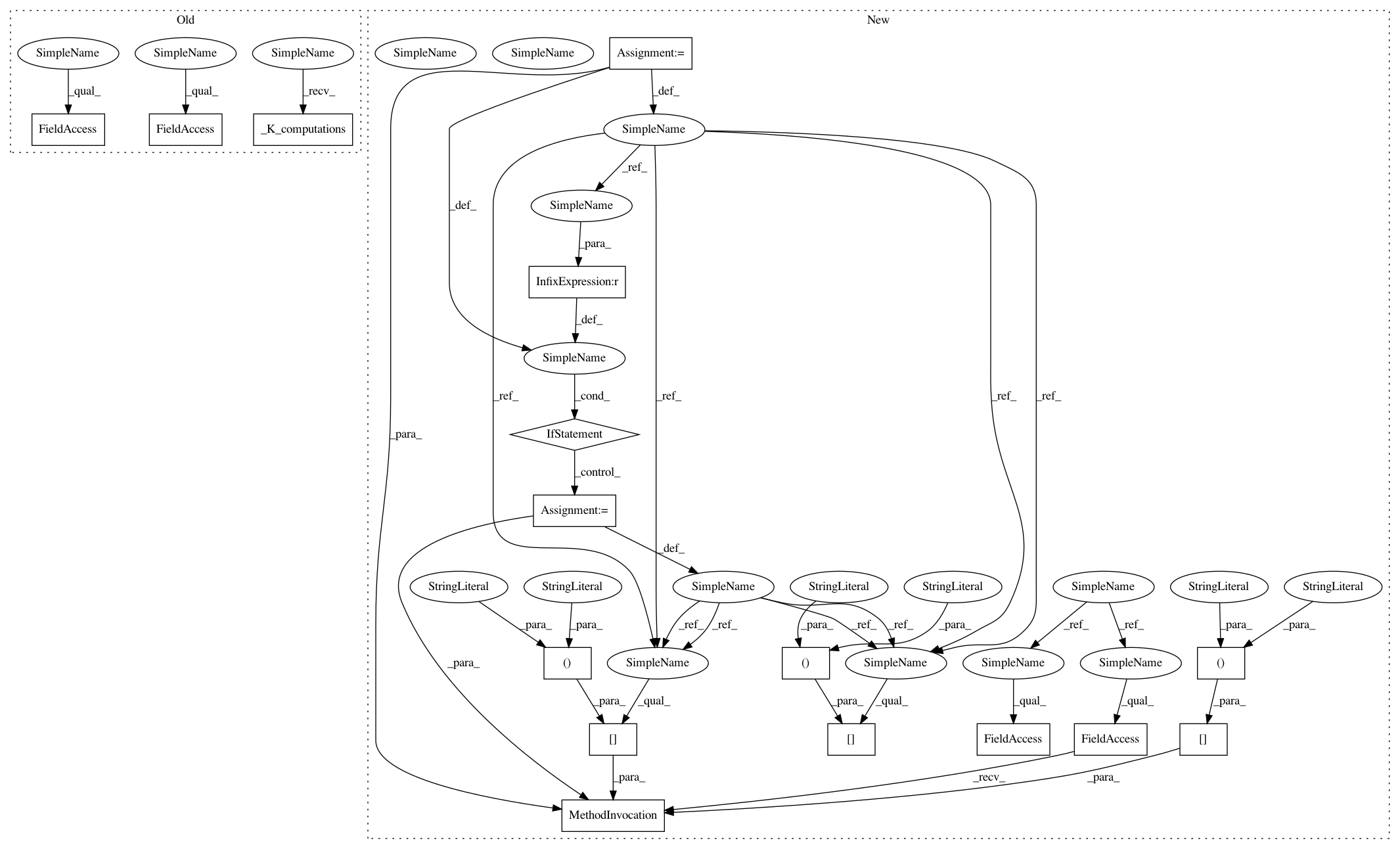
self._K_computations(X,X2)
self.k1.dK_dX(dL_dK*self._K2, X[:,:self.k1.D], X2[:,:self.k1.D], target)
self.k2.dK_dX(dL_dK*self._K1, X[:,self.k1.D:], X2[:,self.k1.D:], target)
def Kdiag(self,X,target):
Compute the diagonal of the covariance matrix associated to X.
After Change
self.k1.dKdiag_dtheta(dL_dKdiag*K2,X[:,:self.k1.D],target[:self.k1.Nparam])
self.k2.dKdiag_dtheta(dL_dKdiag*K1,X[:,self.k1.D:],target[self.k1.Nparam:])
def dK_dX(self,dL_dK,X,X2,target):
derivative of the covariance matrix with respect to X.
if X2 is None: X2 = X
K1 = np.zeros((X.shape[0],X2.shape[0]))
K2 = np.zeros((X.shape[0],X2.shape[0]))
self.k1.K(X[:,0:self.k1.D],X2[:,0:self.k1.D],K1)
self.k2.K(X[:,self.k1.D:],X2[:,self.k1.D:],K2)self.k1.dK_dX(dL_dK*K2, X[:,:self.k1.D], X2[:,:self.k1.D], target)
self.k2.dK_dX(dL_dK*K1, X[:,self.k1.D:], X2[:,self.k1.D:], target)
def dKdiag_dX(self, dL_dKdiag, X, target):