c1eb9e7218672066fa33c264ba63650b9c748eba,donkeycar/parts/lidar.py,RPLidar,update,#RPLidar#,20
Before Change
for new_scan, quality, angle, distance in self.measurements:
angle = int(angle)
self.frame[angle] = 2*distance/3 + self.frame[angle]/3
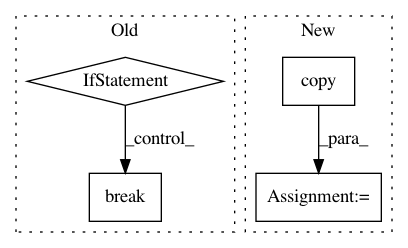
if not self.on:
break
def run_threaded(self):
return self.frame
After Change
measurements = self.lidar.iter_measurments()
while self.on:
for quality, angles, distances in measurements:
self.distances = distances.copy()
self.angles = angles.copy()
def run_threaded(self):
return self.distances, self.angles
In pattern: SUPERPATTERN
Frequency: 3
Non-data size: 4
Instances
Project Name: autorope/donkeycar
Commit Name: c1eb9e7218672066fa33c264ba63650b9c748eba
Time: 2018-07-11
Author: tawnkramer@gmail.com
File Name: donkeycar/parts/lidar.py
Class Name: RPLidar
Method Name: update
Project Name: GoogleCloudPlatform/PerfKitBenchmarker
Commit Name: af164f572888a7ebdd2e6d297f6e35d98d598e53
Time: 2021-03-15
Author: tohaowu@google.com
File Name: perfkitbenchmarker/providers/gcp/gce_virtual_machine.py
Class Name: GceVirtualMachine
Method Name: UpdateInterruptibleVmStatus
Project Name: autorope/donkeycar
Commit Name: c1eb9e7218672066fa33c264ba63650b9c748eba
Time: 2018-07-11
Author: tawnkramer@gmail.com
File Name: donkeycar/parts/lidar.py
Class Name: RPLidar
Method Name: update
Project Name: PaddlePaddle/edl
Commit Name: ed9fb224f3aa4336d066cbbe4b9abf26b24f8535
Time: 2020-09-02
Author: weibao.gong@gmail.com
File Name: python/edl/utils/watcher.py
Class Name: Watcher
Method Name: _watcher