373ae159f7ae1cabaf87228d1ae0fb6acd1c6363,ch14/lib/model.py,AgentDDPG,__call__,#AgentDDPG#,131
Before Change
return None
def __call__(self, states, agent_states):
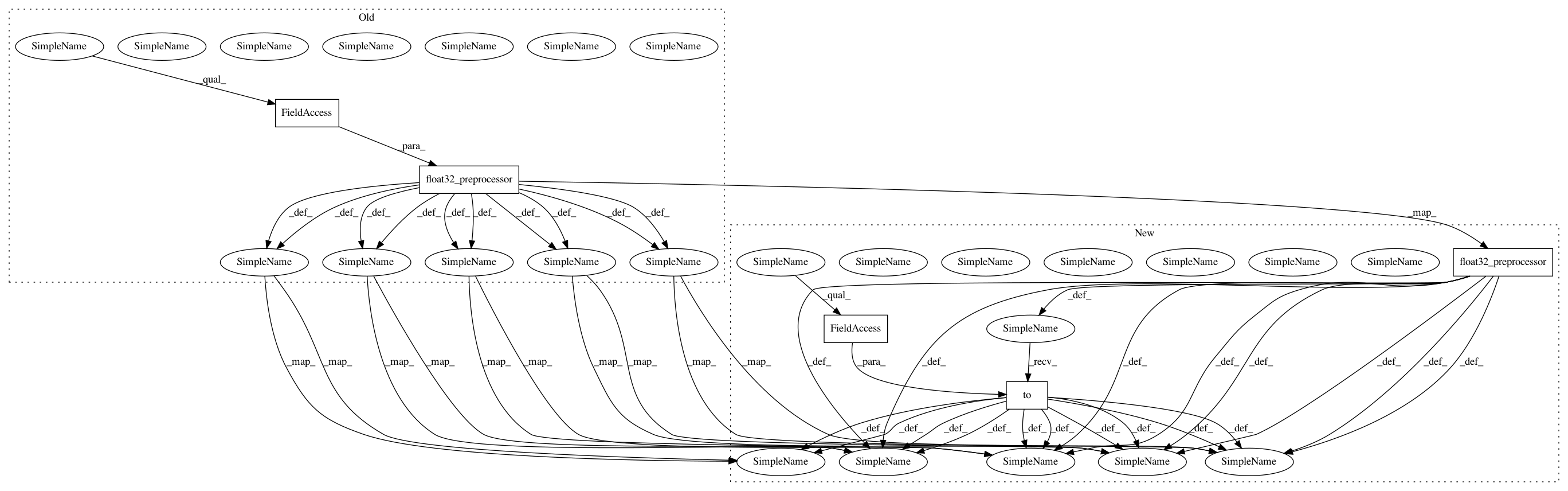
states_v = ptan.agent.float32_preprocessor(states, cuda=self.cuda)
mu_v = self.net(states_v)
actions = mu_v.data.cpu().numpy()
if self.ou_enabled and self.ou_epsilon > 0:
new_a_states = []
for a_state, action in zip(agent_states, actions):
if a_state is None:
a_state = np.zeros(shape=action.shape, dtype=np.float32)
a_state += self.ou_teta * (self.ou_mu - a_state)
a_state += self.ou_sigma * np.random.normal(size=action.shape)
action += self.ou_epsilon * a_state
After Change
return None
def __call__(self, states, agent_states):
states_v = ptan.agent.float32_preprocessor(states).to(self.device)
mu_v = self.net(states_v)
actions = mu_v.data.cpu().numpy()
if self.ou_enabled and self.ou_epsilon > 0:
new_a_states = []
for a_state, action in zip(agent_states, actions):
if a_state is None:
a_state = np.zeros(shape=action.shape, dtype=np.float32)
a_state += self.ou_teta * (self.ou_mu - a_state)
a_state += self.ou_sigma * np.random.normal(size=action.shape)
action += self.ou_epsilon * a_state
In pattern: SUPERPATTERN
Frequency: 3
Non-data size: 5
Instances
Project Name: PacktPublishing/Deep-Reinforcement-Learning-Hands-On
Commit Name: 373ae159f7ae1cabaf87228d1ae0fb6acd1c6363
Time: 2018-04-29
Author: max.lapan@gmail.com
File Name: ch14/lib/model.py
Class Name: AgentDDPG
Method Name: __call__
Project Name: PacktPublishing/Deep-Reinforcement-Learning-Hands-On
Commit Name: 373ae159f7ae1cabaf87228d1ae0fb6acd1c6363
Time: 2018-04-29
Author: max.lapan@gmail.com
File Name: ch14/lib/model.py
Class Name: AgentD4PG
Method Name: __call__
Project Name: PacktPublishing/Deep-Reinforcement-Learning-Hands-On
Commit Name: d5b0cd8e7960c247bb7c5b7c832358f8831780fb
Time: 2018-04-29
Author: max.lapan@gmail.com
File Name: ch15/lib/model.py
Class Name: AgentA2C
Method Name: __call__