9001639a8d317bc069661222a56d5d216d872085,tests/test_mpc.py,,test_lqr_linear_unbounded,#,91
Before Change
dynamics = AffineDynamics(R[0,0], S[0,0], f[0,0])
u_lqr = None
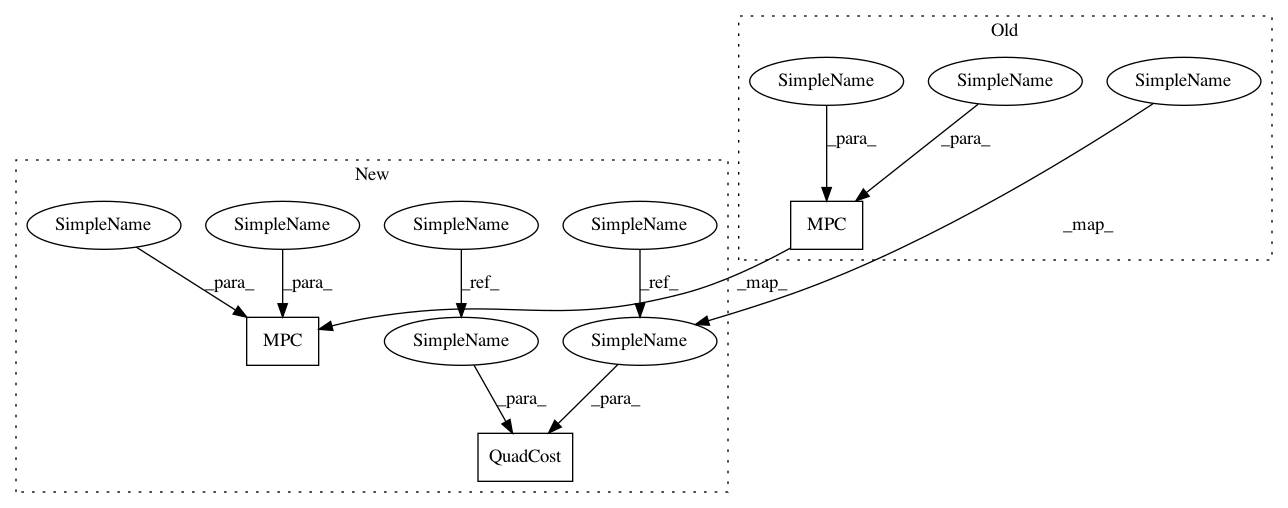
x_lqr, u_lqr, objs_lqr = mpc.MPC(
n_state, n_ctrl, T, x_init, u_lower, u_upper, u_lqr,
lqr_iter=10,
backprop=False,
verbose=1,
exit_unconverged=False,
)(C, c, dynamics)
tau_lqr = torch.cat((x_lqr, u_lqr), 2)
tau_lqr = util.get_data_maybe(tau_lqr)
npt.assert_allclose(tau_cp, tau_lqr[:,0].numpy(), rtol=1e-3)
u_lqr = None
x_lqr, u_lqr, objs_lqr = mpc.MPC(
n_state, n_ctrl, T, x_init, None, None, u_lqr,
lqr_iter=10,
backprop=False,
exit_unconverged=False,
)(C, c, dynamics)
tau_lqr = torch.cat((x_lqr, u_lqr), 2)
tau_lqr = util.get_data_maybe(tau_lqr)
npt.assert_allclose(tau_cp, tau_lqr[:,0].numpy(), rtol=1e-3)
After Change
n_sc = n_state + n_ctrl
T = 5
C = npr.randn(T, n_batch, n_sc, n_sc)
C = np.matmul(C.transpose(0, 1, 3, 2), C)
c = npr.randn(T, n_batch, n_sc)
alpha = 0.2
R = np.tile(np.eye(n_state)+alpha*np.random.randn(n_state, n_state),
(T, n_batch, 1, 1))
S = np.tile(np.random.randn(n_state, n_ctrl), (T, n_batch, 1, 1))
F = np.concatenate((R, S), axis=3)
f = np.tile(npr.randn(n_state), (T, n_batch, 1))
x_init = npr.randn(n_batch, n_state)
// u_lower = -100.*npr.random((T, n_batch, n_ctrl))
// u_upper = 100.*npr.random((T, n_batch, n_ctrl))
u_lower = -1e4*np.ones((T, n_batch, n_ctrl))
u_upper = 1e4*np.ones((T, n_batch, n_ctrl))
tau_cp, objs_cp = lqr_cp(
C[:,0], c[:,0], F[:,0], f[:,0], x_init[0], T, n_state, n_ctrl,
None, None
)
tau_cp = tau_cp.T
x_cp = tau_cp[:,:n_state]
u_cp = tau_cp[:,n_state:]
C, c, R, S, F, f, x_init, u_lower, u_upper = [
Variable(torch.Tensor(x).double()) if x is not None else None
for x in [C, c, R, S, F, f, x_init, u_lower, u_upper]
]
dynamics = AffineDynamics(R[0,0], S[0,0], f[0,0])
u_lqr = None
x_lqr, u_lqr, objs_lqr = mpc.MPC(
n_state, n_ctrl, T, u_lower, u_upper, u_lqr,
lqr_iter=10,
backprop=False,
verbose=1,
exit_unconverged=True,
)(x_init, QuadCost(C, c), dynamics)
tau_lqr = torch.cat((x_lqr, u_lqr), 2)
tau_lqr = util.get_data_maybe(tau_lqr)
npt.assert_allclose(tau_cp, tau_lqr[:,0].numpy(), rtol=1e-3)
u_lqr = None
x_lqr, u_lqr, objs_lqr = mpc.MPC(
n_state, n_ctrl, T, None, None, u_lqr,
lqr_iter=10,
backprop=False,
exit_unconverged=False,
)(x_init, QuadCost(C, c), dynamics)
tau_lqr = torch.cat((x_lqr, u_lqr), 2)
tau_lqr = util.get_data_maybe(tau_lqr)
npt.assert_allclose(tau_cp, tau_lqr[:,0].numpy(), rtol=1e-3)
In pattern: SUPERPATTERN
Frequency: 4
Non-data size: 3
Instances
Project Name: locuslab/mpc.pytorch
Commit Name: 9001639a8d317bc069661222a56d5d216d872085
Time: 2018-10-10
Author: bamos@cs.cmu.edu
File Name: tests/test_mpc.py
Class Name:
Method Name: test_lqr_linear_unbounded
Project Name: locuslab/mpc.pytorch
Commit Name: 9001639a8d317bc069661222a56d5d216d872085
Time: 2018-10-10
Author: bamos@cs.cmu.edu
File Name: tests/test_mpc.py
Class Name:
Method Name: test_lqr_cuda_singleton
Project Name: locuslab/mpc.pytorch
Commit Name: 9001639a8d317bc069661222a56d5d216d872085
Time: 2018-10-10
Author: bamos@cs.cmu.edu
File Name: tests/test_mpc.py
Class Name:
Method Name: test_lqr_linear_unbounded