for i in sm.xrange(nb_images):
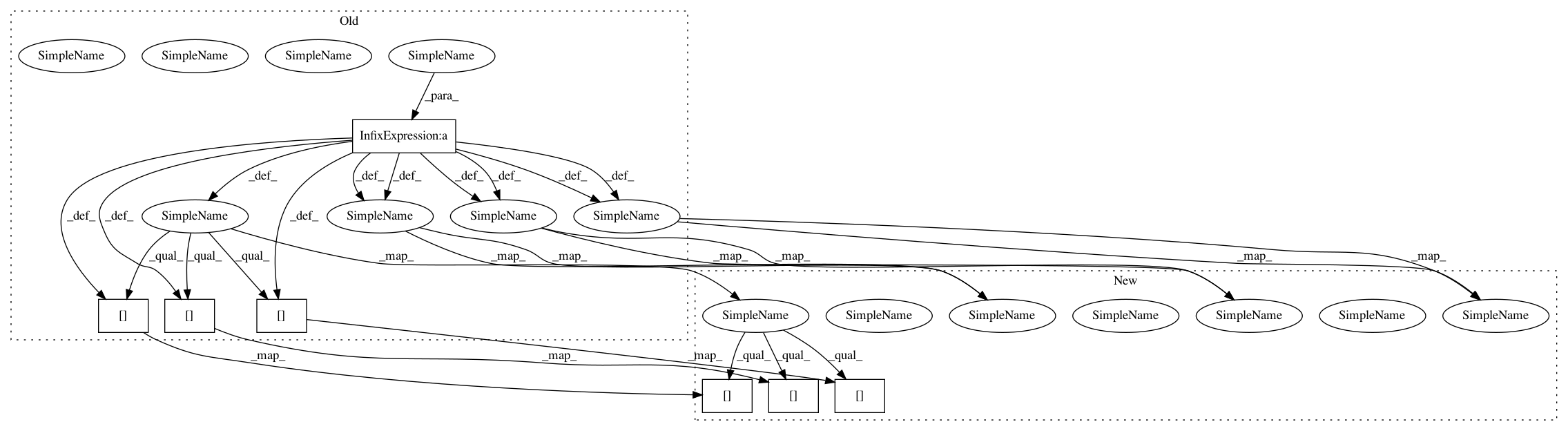
h, w = shapes[i][0:2]
points = self.jitter.draw_samples((4, 2), random_state=rngs[2+i])
points = np.mod(np.abs(points), 1)
// modify jitter to the four corner point coordinates
// some x/y values have to be modified from `jitter` to `1-jtter`
// for that
// top left -- no changes needed, just use jitter
// top right
points[2, 0] = 1.0 - points[2, 0] // h = 1.0 - jitter
// bottom right
points[1, 0] = 1.0 - points[1, 0] // w = 1.0 - jitter
points[1, 1] = 1.0 - points[1, 1] // h = 1.0 - jitter
// bottom left
points[0, 1] = 1.0 - points[0, 1] // h = 1.0 - jitter
points[:, 0] = points[:, 0] * w
points[:, 1] = points[:, 1] * h
// obtain a consistent order of the points and unpack them
// individually
points = self._order_points(points)
(tl, tr, br, bl) = points
// TODO remove these loops
// compute the width of the new image, which will be the
// maximum distance between bottom-right and bottom-left
// x-coordiates or the top-right and top-left x-coordinates
min_width = None
while min_width is None or min_width < self.min_width:
width_a = np.sqrt(((br[0]-bl[0])**2) + ((br[1]-bl[1])**2))
width_b = np.sqrt(((tr[0]-tl[0])**2) + ((tr[1]-tl[1])**2))
max_width = max(int(width_a), int(width_b))
min_width = min(int(width_a), int(width_b))
if min_width < self.min_width:
tl[0] -= self.shift_step_size
tr[0] += self.shift_step_size
bl[0] -= self.shift_step_size
br[0] += self.shift_step_size
// compute the height of the new image, which will be the
// maximum distance between the top-right and bottom-right
// y-coordinates or the top-left and bottom-left y-coordinates
min_height = None
while min_height is None or min_height < self.min_height:
height_a = np.sqrt(((tr[0]-br[0])**2) + ((tr[1]-br[1])**2))
height_b = np.sqrt(((tl[0]-bl[0])**2) + ((tl[1]-bl[1])**2))
max_height = max(int(height_a), int(height_b))
min_height = min(int(height_a), int(height_b))
if min_height < self.min_height:
tl[1] -= self.shift_step_size
tr[1] -= self.shift_step_size
bl[1] += self.shift_step_size
br[1] += self.shift_step_size
// now that we have the dimensions of the new image, construct
// the set of destination points to obtain a "birds eye view",
// (i.e. top-down view) of the image, again specifying points
// in the top-left, top-right, bottom-right, and bottom-left
// order
dst = np.array([
[0, 0],
[max_width - 1, 0],
[max_width - 1, max_height - 1],
[0, max_height - 1]
], dtype="float32")
// compute the perspective transform matrix and then apply it
m = cv2.getPerspectiveTransform(points, dst)
if self.fit_output:
m, max_width, max_height = self._expand_transform(m, (h, w))
After Change
for shape, rng in zip(shapes, rngs[2:]):
h, w = shape[0:2]
points = self.jitter.draw_samples((4, 2), random_state=rng)
points = np.mod(np.abs(points), 1)
// modify jitter to the four corner point coordinates
// some x/y values have to be modified from `jitter` to `1-jtter`
// for that
// top left -- no changes needed, just use jitter
// top right
points[2, 0] = 1.0 - points[2, 0] // h = 1.0 - jitter
// bottom right
points[1, 0] = 1.0 - points[1, 0] // w = 1.0 - jitter
points[1, 1] = 1.0 - points[1, 1] // h = 1.0 - jitter
// bottom left
points[0, 1] = 1.0 - points[0, 1] // h = 1.0 - jitter
points[:, 0] = points[:, 0] * w
points[:, 1] = points[:, 1] * h
// obtain a consistent order of the points and unpack them
// individually
points = self._order_points(points)
(tl, tr, br, bl) = points
// TODO remove these loops
// compute the width of the new image, which will be the
// maximum distance between bottom-right and bottom-left
// x-coordiates or the top-right and top-left x-coordinates
min_width = None
while min_width is None or min_width < self.min_width:
width_a = np.sqrt(((br[0]-bl[0])**2) + ((br[1]-bl[1])**2))
width_b = np.sqrt(((tr[0]-tl[0])**2) + ((tr[1]-tl[1])**2))
max_width = max(int(width_a), int(width_b))
min_width = min(int(width_a), int(width_b))
if min_width < self.min_width:
tl[0] -= self.shift_step_size
tr[0] += self.shift_step_size
bl[0] -= self.shift_step_size
br[0] += self.shift_step_size
// compute the height of the new image, which will be the
// maximum distance between the top-right and bottom-right
// y-coordinates or the top-left and bottom-left y-coordinates
min_height = None
while min_height is None or min_height < self.min_height:
height_a = np.sqrt(((tr[0]-br[0])**2) + ((tr[1]-br[1])**2))
height_b = np.sqrt(((tl[0]-bl[0])**2) + ((tl[1]-bl[1])**2))
max_height = max(int(height_a), int(height_b))
min_height = min(int(height_a), int(height_b))
if min_height < self.min_height:
tl[1] -= self.shift_step_size
tr[1] -= self.shift_step_size
bl[1] += self.shift_step_size
br[1] += self.shift_step_size
// now that we have the dimensions of the new image, construct
// the set of destination points to obtain a "birds eye view",
// (i.e. top-down view) of the image, again specifying points
// in the top-left, top-right, bottom-right, and bottom-left
// order
dst = np.array([
[0, 0],
[max_width - 1, 0],
[max_width - 1, max_height - 1],
[0, max_height - 1]
], dtype="float32")
// compute the perspective transform matrix and then apply it
m = cv2.getPerspectiveTransform(points, dst)
if self.fit_output:
m, max_width, max_height = self._expand_transform(m, (h, w))