ff9c1dac887643e464f5f829c7d8b920b0aa8140,rllib/agents/ddpg/ddpg_torch_policy.py,,ddpg_actor_critic_loss,#,30
Before Change
mean=torch.zeros(policy_tp1.size()),
std=policy.config["target_noise"]), -target_noise_clip,
target_noise_clip)
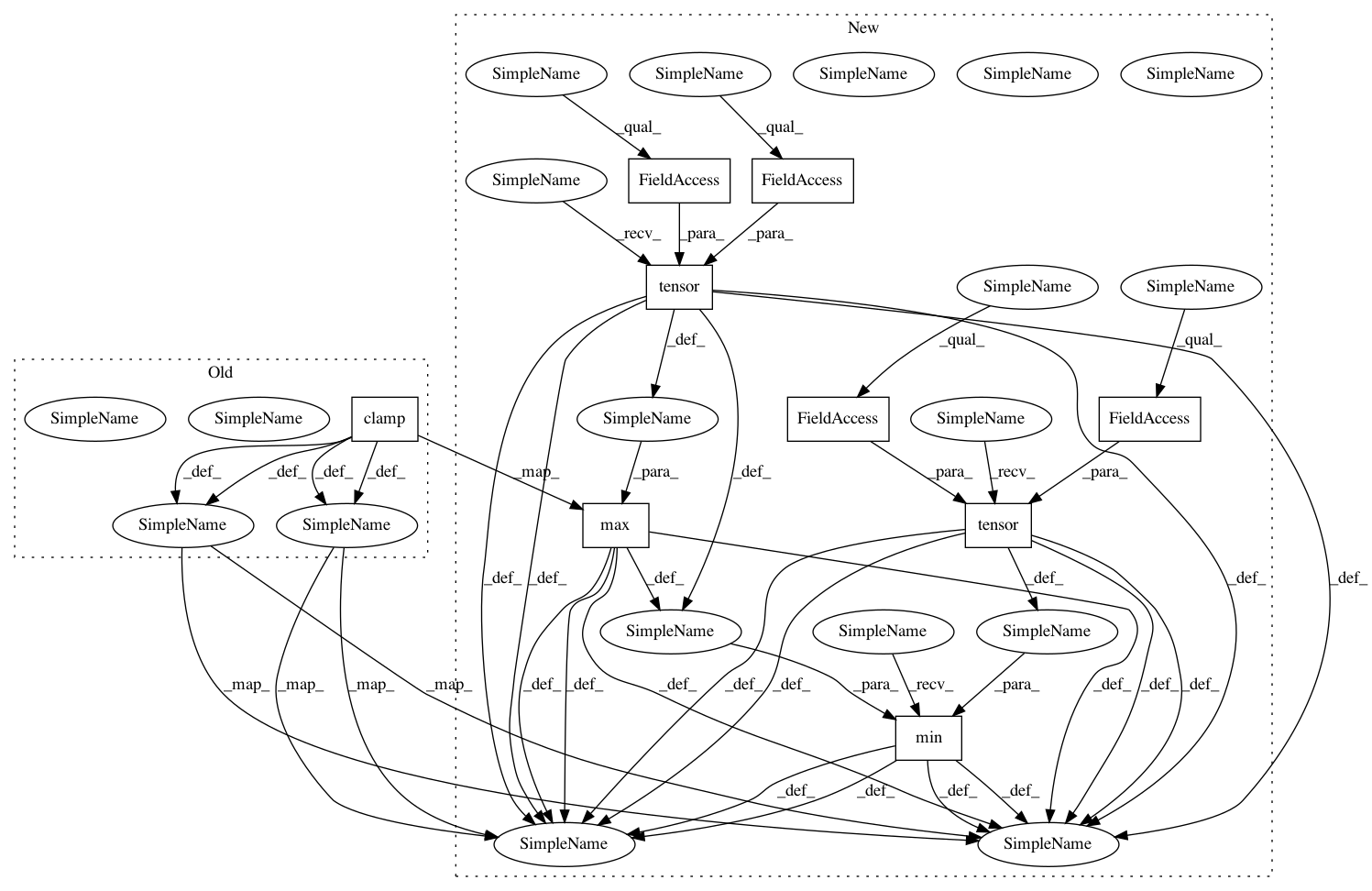
policy_tp1_smoothed = torch.clamp(policy_tp1 + clipped_normal_sample,
policy.action_space.low.item(0),
policy.action_space.high.item(0))
else:
// No smoothing, just use deterministic actions.
policy_tp1_smoothed = policy_tp1
// Q-net(s) evaluation.
// prev_update_ops = set(tf1.get_collection(tf.GraphKeys.UPDATE_OPS))
// Q-values for given actions & observations in given current
q_t = model.get_q_values(model_out_t, train_batch[SampleBatch.ACTIONS])
// Q-values for current policy (no noise) in given current state
q_t_det_policy = model.get_q_values(model_out_t, policy_t)
actor_loss = -torch.mean(q_t_det_policy)
if twin_q:
twin_q_t = model.get_twin_q_values(model_out_t,
train_batch[SampleBatch.ACTIONS])
// q_batchnorm_update_ops = list(
// set(tf1.get_collection(tf.GraphKeys.UPDATE_OPS)) - prev_update_ops)
// Target q-net(s) evaluation.
q_tp1 = policy.target_model.get_q_values(target_model_out_tp1,
policy_tp1_smoothed)
if twin_q:
twin_q_tp1 = policy.target_model.get_twin_q_values(
target_model_out_tp1, policy_tp1_smoothed)
q_t_selected = torch.squeeze(q_t, axis=len(q_t.shape) - 1)
if twin_q:
twin_q_t_selected = torch.squeeze(twin_q_t, axis=len(q_t.shape) - 1)
q_tp1 = torch.min(q_tp1, twin_q_tp1)
q_tp1_best = torch.squeeze(input=q_tp1, axis=len(q_tp1.shape) - 1)
q_tp1_best_masked = \
(1.0 - train_batch[SampleBatch.DONES].float()) * \
q_tp1_best
// Compute RHS of bellman equation.
q_t_selected_target = (train_batch[SampleBatch.REWARDS] +
gamma**n_step * q_tp1_best_masked).detach()
// Compute the error (potentially clipped).
if twin_q:
td_error = q_t_selected - q_t_selected_target
twin_td_error = twin_q_t_selected - q_t_selected_target
td_error = td_error + twin_td_error
if use_huber:
errors = huber_loss(td_error, huber_threshold) \
+ huber_loss(twin_td_error, huber_threshold)
else:
errors = 0.5 * \
(torch.pow(td_error, 2.0) + torch.pow(twin_td_error, 2.0))
else:
td_error = q_t_selected - q_t_selected_target
if use_huber:
errors = huber_loss(td_error, huber_threshold)
else:
errors = 0.5 * torch.pow(td_error, 2.0)
After Change
-target_noise_clip,
target_noise_clip)
policy_tp1_smoothed = torch.min(
torch.max(
policy_tp1 + clipped_normal_sample,
torch.tensor(
policy.action_space.low,
dtype=torch.float32,
device=policy_tp1.device)),
torch.tensor(
policy.action_space.high,
dtype=torch.float32,
device=policy_tp1.device))
else:
// No smoothing, just use deterministic actions.
policy_tp1_smoothed = policy_tp1
// Q-net(s) evaluation.
// prev_update_ops = set(tf1.get_collection(tf.GraphKeys.UPDATE_OPS))
// Q-values for given actions & observations in given current
q_t = model.get_q_values(model_out_t, train_batch[SampleBatch.ACTIONS])
// Q-values for current policy (no noise) in given current state
q_t_det_policy = model.get_q_values(model_out_t, policy_t)
actor_loss = -torch.mean(q_t_det_policy)
if twin_q:
twin_q_t = model.get_twin_q_values(model_out_t,
train_batch[SampleBatch.ACTIONS])
// q_batchnorm_update_ops = list(
// set(tf1.get_collection(tf.GraphKeys.UPDATE_OPS)) - prev_update_ops)
// Target q-net(s) evaluation.
q_tp1 = policy.target_model.get_q_values(target_model_out_tp1,
policy_tp1_smoothed)
if twin_q:
twin_q_tp1 = policy.target_model.get_twin_q_values(
target_model_out_tp1, policy_tp1_smoothed)
q_t_selected = torch.squeeze(q_t, axis=len(q_t.shape) - 1)
if twin_q:
twin_q_t_selected = torch.squeeze(twin_q_t, axis=len(q_t.shape) - 1)
q_tp1 = torch.min(q_tp1, twin_q_tp1)
q_tp1_best = torch.squeeze(input=q_tp1, axis=len(q_tp1.shape) - 1)
q_tp1_best_masked = \
(1.0 - train_batch[SampleBatch.DONES].float()) * \
q_tp1_best
// Compute RHS of bellman equation.
q_t_selected_target = (train_batch[SampleBatch.REWARDS] +
gamma**n_step * q_tp1_best_masked).detach()
// Compute the error (potentially clipped).
if twin_q:
td_error = q_t_selected - q_t_selected_target
twin_td_error = twin_q_t_selected - q_t_selected_target
td_error = td_error + twin_td_error
if use_huber:
errors = huber_loss(td_error, huber_threshold) \
+ huber_loss(twin_td_error, huber_threshold)
else:
errors = 0.5 * \
(torch.pow(td_error, 2.0) + torch.pow(twin_td_error, 2.0))
else:
td_error = q_t_selected - q_t_selected_target
if use_huber:
errors = huber_loss(td_error, huber_threshold)
else:
errors = 0.5 * torch.pow(td_error, 2.0)
In pattern: SUPERPATTERN
Frequency: 3
Non-data size: 9
Instances
Project Name: ray-project/ray
Commit Name: ff9c1dac887643e464f5f829c7d8b920b0aa8140
Time: 2020-07-28
Author: sven@anyscale.io
File Name: rllib/agents/ddpg/ddpg_torch_policy.py
Class Name:
Method Name: ddpg_actor_critic_loss
Project Name: ray-project/ray
Commit Name: ff9c1dac887643e464f5f829c7d8b920b0aa8140
Time: 2020-07-28
Author: sven@anyscale.io
File Name: rllib/agents/ddpg/ddpg_torch_policy.py
Class Name:
Method Name: ddpg_actor_critic_loss
Project Name: ray-project/ray
Commit Name: ff9c1dac887643e464f5f829c7d8b920b0aa8140
Time: 2020-07-28
Author: sven@anyscale.io
File Name: rllib/utils/exploration/gaussian_noise.py
Class Name: GaussianNoise
Method Name: _get_torch_exploration_action
Project Name: ray-project/ray
Commit Name: ff9c1dac887643e464f5f829c7d8b920b0aa8140
Time: 2020-07-28
Author: sven@anyscale.io
File Name: rllib/utils/exploration/ornstein_uhlenbeck_noise.py
Class Name: OrnsteinUhlenbeckNoise
Method Name: _get_torch_exploration_action