:return: Xs_new and Xt_new after TCA
"""
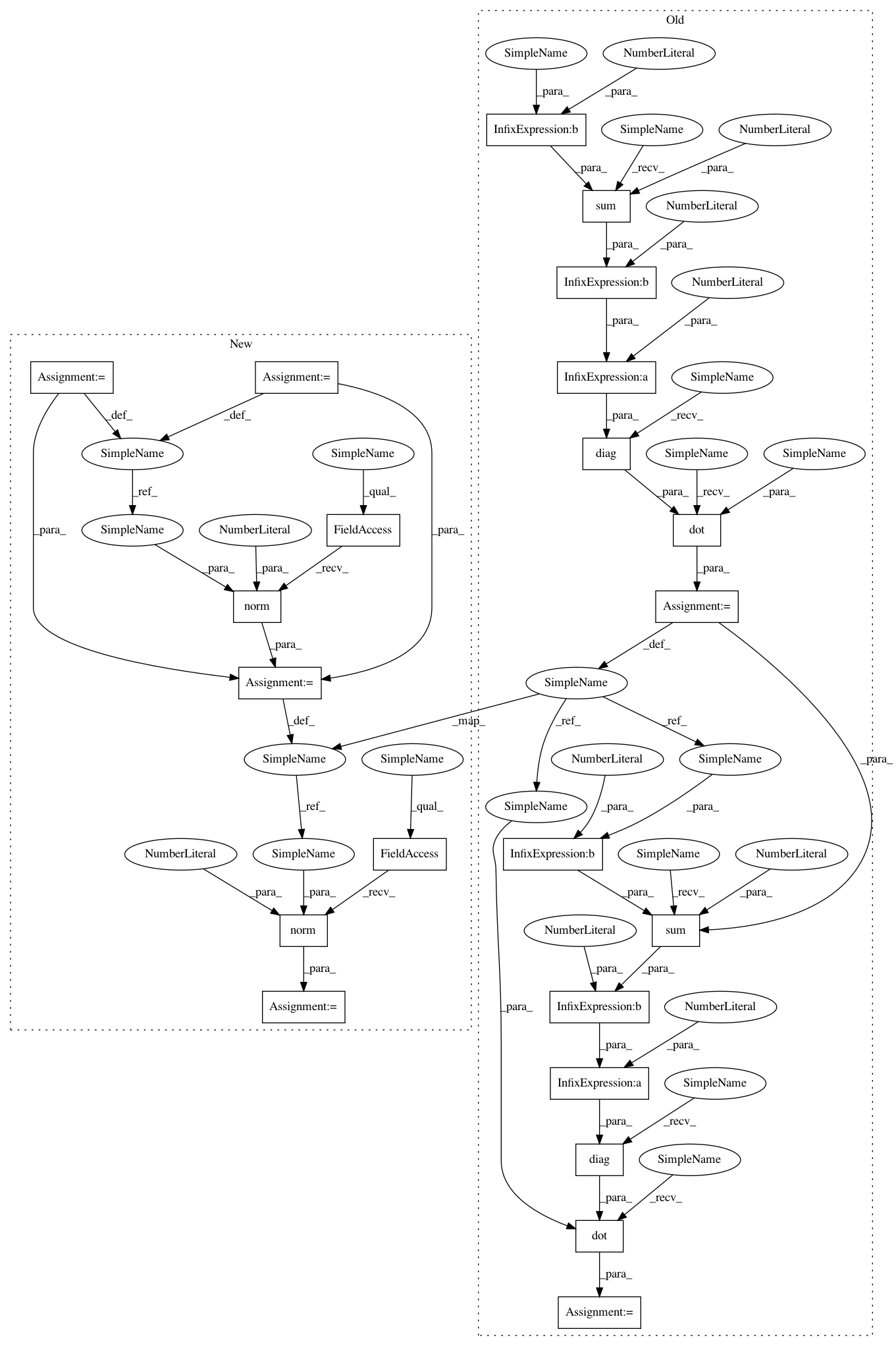
X = np.hstack((self.Xs.T, self.Xt.T))
X = np.dot(X, np.diag(1 / (np.sum(X ** 2, axis=0) ** 0.5)))
m, n = X.shape
ns, nt = len(self.Xs), len(self.Xt)
e = np.vstack((1 / ns * np.ones((ns, 1)), -1 / nt * np.ones((nt, 1))))
M = e * e.T
M = M / np.linalg.norm(M, "fro")
H = np.eye(n) - 1 / n * np.ones((n, n))
K = kernel(self.kernel_type, X, None, gamma=self.gamma)
n_eye = m if self.kernel_type == "primal" else n
a, b = np.linalg.multi_dot([K, M, K.T]) + self.lamb * np.eye(n_eye), np.linalg.multi_dot([K, H, K.T])
w, V = scipy.linalg.eig(a, b)
ind = np.argsort(w)
A = V[:, ind[:self.dim]]
Z = np.dot(A.T, K)
Z = np.dot(Z, np.diag(1 / (np.sum(Z ** 2, axis=0) ** 0.5)))
Xs_new, Xt_new = Z[:, :ns].T, Z[:, ns:].T
return Xs_new, Xt_new
def fit_predict(self):
After Change
:param Xt: nt * n_feature, target feature
:return: Xs_new and Xt_new after TCA
"""
X = np.hstack((Xs.T, Xt.T))
X /= np.linalg.norm(X, axis=0)
m, n = X.shape
ns, nt = len(Xs), len(Xt)
e = np.vstack((1 / ns * np.ones((ns, 1)), -1 / nt * np.ones((nt, 1))))
M = e * e.T
M = M / np.linalg.norm(M, "fro")
H = np.eye(n) - 1 / n * np.ones((n, n))
K = kernel(self.kernel_type, X, None, gamma=self.gamma)
n_eye = m if self.kernel_type == "primal" else n
a, b = np.linalg.multi_dot([K, M, K.T]) + self.lamb * np.eye(n_eye), np.linalg.multi_dot([K, H, K.T])
w, V = scipy.linalg.eig(a, b)
ind = np.argsort(w)
A = V[:, ind[:self.dim]]
Z = np.dot(A.T, K)
Z /= np.linalg.norm(Z, axis=0)
Xs_new, Xt_new = Z[:, :ns].T, Z[:, ns:].T
return Xs_new, Xt_new
def fit_predict(self, Xs, Ys, Xt, Yt):